dpl -
Dalsoft's Parallel Library - is the library that consists of the routines that:
For the users manual of this product click here.
Here we will
dpl allows parallel execution of a number of sequential algorithms.
As the supported algorithms are inherently sequential,
significant mathematical transformations are necessary for their parallel implementation.
dpl offers the following functions that provide parallel implementation for the various serial stencils:
dpl_stencil_1p
x[i] = b(i) + a(i)*x[i-STRIDE]
dpl_stencil_o_1p
x[i] = c(i)*x[i] + b(i) + a(i)*x[i-STRIDE]
dpl_stencil_div_1p
x[i] = b(i) + a(i)/x[i-STRIDE]
dpl_stencil_o_div_1p
x[i] = c(i)*x[i] + b(i) + a(i)/x[i-STRIDE]
dpl_stencil_2p
x[i] = a(i)*x[i-1] + b(i) + c(i)*x[i-2]
dpl_stencil_o_2p
x[i] = d(i)*x[i] + b(i) + a(i)*x[i-1] + c(i)*x[i-2]
dpl_stencil_acc
acc = b(i) + a(i)*acc
dpl_stencil_div_acc
acc = b(i) + a(i)/acc
dpl_stencil
x[i] = b(i) + ∑j<ia(i,j)*x[i]
dpl_stencil_min
x[i] = min( a(i)*x[i-1], b(i) )
dpl_stencil_max
x[i] = max( a(i)*x[i-1], b(i) )
Here we provide only a brief description of the items necessary to define the implemented functions;
see this for the
more complete and extensive explanation.
We define vector x of the size N
to be a stochastic maximum of the vectors
a and b of the size
N:
x = maxst( a, b )
as the solution of the following system of equations:
for every i = 0...N-1
∑( j=i...N-1:x[j] ) = max( ∑( j=i...N-1:a[j] ), ∑( j=i...N-1:b[j] ) )
dpl_max_st
x = maxst( a, b )
dpl's function
dpl_stochastic_max
int dpl_stochastic_max( N, a, x )
unsigned long N,
const double *b,
double *x
)
performs parallel calculation of the output matrix x of the size
NxN to be the stochastic matrix
of the input matrix b of the size NxN
as the following stencil:
( with m[j,*] representing j's row of the
matrix m )
x[0,*] = b[0,*]
x[i,*] = maxst( x[i-1,*], b[i,*] )
for i = 1...N-1
dpl's function dpl_gs performs parallel execution
of the Gauss-Seidel method to solve a linear system of equations
( see this for the description
of the implemented Gauss-Seidel method ).
The provided implementation consistently
outperforms by a huge margin the serial implementation of the Gauss-Seidel method.
dpl's function
dpl_p1p0_p0p1_p0p0_p0n1_n1p0
int dpl_p1p0_p0p1_p0p0_p0n1_n1p0(
unsigned long rows, unsigned long cols,
const double *ap1p0,
const double *ap0p1,
const double *ap0p0,
const double *ap0n1,
const double *an1p0,
const double *b,
double *x
)
performs parallel execution of the general 2D 5-points stencil as following:
The technology we developed allows successful parallel implementation of the great variety of serial stencils.
The stencils actually parallelized ( and listed in this document ) are only a part of what can be done.
Please Contact us to discuss the parallel implementation of serial stencils of your choice.
See this for more on that.
While developing dpl we discovered, studied and implemented the great variety of techniques and methods that may improve code performance, e.g. techniques for hiding memory latencies - see
this for example of it use.
dpl achieves parallel implementation of supported functions by
performing mathematical transformations on the underlying algorithm producing a parallel algorithm;
of course, when programming this algorithm ( in C )
the care is taken of many aspects of computation such as cache utilization, load balancing, process synchronization etc.
We performed comprehensive study of the parallel implementation of the functions from dpl
analyzing the accuracy of the generated results
and evaluating their performance; we compared this data to data collected while executing the corresponding serial code and/or
library functions.
The following lists the results for
While comparing timing for different kinds of code the following algorithm was used:
1 - ( timeOfTheParallelCode / timeOfTheReferenceCode )
For example if the reference code run for 8.97 seconds and the parallel code run for 3.31 seconds the
improvement of 63% was reported.
Note that improvement calculated in such a way never exceed 100%. Also note that improvement of 50% means
that parallel code is twice as fast as the reference code, the improvement of 75% means
that parallel code is four times faster that the reference code.
While studying basic stencils we just executed code on as many multi-core CPU's as we could get access to.
Studying stochastic ordering, Gauss–Seidel method to solve a linear system of equations and general 2D 5-points stencil as well as evaluating the use of the dpl library in benchmarks
was much more comprehensive as we attempted to achieve many goals:
- to verify accuracy of the results of the parallel code
- to compare the performance of the parallel code to the performance of different implementations of the same or similar algorithms ( e.g. code from a library )
- to understand how the size of the problem and/or the number of available threads affects performance
While comparing timing for different kinds of code the following algorithm was used:
The codes were executed under Linux operating system and, if not stated otherwise,
the Intel(R) Xeon(R) Gold 6226R CPU @ 2.90GHz with 16 threads processor
from the Microway's compute cluster was used;
we are grateful for the HPC time provided by Microway, Inc..
When it was desirable to use different number of threads, that was established using the standard OpenMP/bash command sequence:
OMP_NUM_THREADS=number_of_threads;export OMP_NUM_THREADS;
Such an approach ensures that execution environments differ only by the number
of threads utilized; the latency of instructions, memory access costs, sizes of caches are the same.
The threads numbers we studied are 6, 8, and 10 which corresponds
to the threads numbers available on the commonly sold workstations CPU's.
Note that stencil computations are memory bound, thus stencil code efficiency is often impaired by the high memory access costs.
As of now, memory access remains the weak point of the multi-core CPUs,
therefore the expectations of the stencils parallel code improvements shall be reasonable.
To achieve performance gains the code that uses dpl shall be executed on a robust multi-core CPU. Running such a code on
a cloud-based alternatives to physical hardware or WSL didn't show much of an improvement.
Because dpl implements desirable algorithms differently from the way it is done
by a sequential implementation of the corresponding formula, it is necessary to verify:
How different are the results generated by parallel code from the results generated by the corresponding sequential code
Also, due to the inexact nature of the floating point calculation, the results generated by the sequential code may not be fully trusted.
It is therefore necessary to verify
How different are the results generated by parallel code from the precise ( calculated with unlimited precision ) results that implement sequential algorithm
The implemented verification process is almost identical to the one described in the chapter testing dco parallelization of a stencil found
here.
The results of this verification show that, in most cases,
the difference between parallel and sequential results is acceptably small.
However there are exception to this - functions that use division:
dpl_stencil_div_1p, dpl_stencil_o_div_1p and
dpl_stencil_div_acc.
Let study such an exception - case with the difference between the result generated by the dpl provided parallel code and
the result generated by the corresponding sequential code appears to be "big".
In most cases the results to be verified are vectors of double precision values.
Define norms that will help with evaluation. For vectors x and x1 of the size ( dimension ) n we define:
Maximal Relative Difference ( MaxRelDiff )
max( fabs( 2.*( x[i] - x1[i] ) )/( fabs( x[i] ) + fabs( x1[i] ) ), i=0,...,n-1
Vector Relative Difference ( VectorRelDiff )
|x - x1|/|x1|
where
|vector| = √ ∑( vector[i] )2
Vector Normal Difference ( VectorNormDiff )
max( | x[i] - x1[i] | ), for i = 0,...,n-1
Comprehensive evaluation of the function dpl_stencil_o_div_1p using
drt based evaluation procedure ( see this for more information )
reported the following data for the worst case detected:
stencil_div_o_1p cmp_parallel_serial_loop
MaxRelDiff: 3.265649e-04
VectorRelDiff: 2.630082e-04
VectorNormDiff: 1.710950e-01
Happen in the test case 3804350 at the index 875 of 1000 with the stride 1
dplRslt=-523.83780351572954714
exRslt= -524.00889851128829378
Total 7119197, Attempted 7119197, Done 7119197 cases for 1000 seconds error count = 10152.
Random number generator seed used 1596510236.
The data seems to be disappointing, the result derived by using dpl parallel library ( dplRslt )
agrees with the result generated by the sequential code ( exRslt ) in less than 4 decimal places.
Also, all the norms show low level of convergence.
Let further investigate this case.
First, we create serial implementation of the function dpl_stencil_o_div_1p using
the routines from the Dalsoft's High Precision ( dhp ) library
( see this for details ) - the result produced by this implementation
we will call preciseRslt; we assume that the preciseRslt, generated utilizing floating point numbers with 128-bits mantissa,
is fully accurate when expressed as 64-bit double precision value.
Second, taking advantage of the functionality supported by drt, we recreated the case to be studied
( establishing the used seed and skipping 3804350 cases to the case where the problem was observed ) and perform
the following testing on it:
- compare the result, derived by using dpl parallel library, - dplRslt -
with the preciseRslt.
- compare the result, generated by the sequential code, - exRslt -
with the preciseRslt.
comparing the result derived by using dpl parallel library - dplRslt -
with the preciseRslt, generated the following data:
stencil_div_o_1p cmp_parallel_serialhp
Dim.errs.chsums 1000 0 0 -6777.462714921427505
-6774.995656373027487
MaxRelDiff 3.925580826263917e-04
VectorRelDiff 3.161913979263145e-04
VectorNormDiff 2.055964094892033e-01
comparing the result generated by the sequential code - exRslt -
with the preciseRslt, generated the following data:
stencil_div_o_1p cmp_serial_serialhp
Dim.errs.chsums 1000 0 0 -6779.515773068097587
-6774.995656373027487
MaxRelDiff 7.191229955145954e-04
VectorRelDiff 5.793222860496758e-04
VectorNormDiff 3.766914050479500e-01
The following table summarizes the above results.
Each row represents the norm being used.
The first column contains values for these norms
when comparing the result derived by using dpl parallel library - dplRslt -
with the preciseRslt.
The second column contains values for these norms
when comparing results generated by the sequential code - exRslt - with the preciseRslt.
|
dplRslt vs preciseRslt |
exRslt vs preciseRslt |
|
MaxRelDiff
|
3.925580826263917e-04 |
7.191229955145954e-04 |
|
VectorRelDiff
|
3.161913979263145e-04 |
5.793222860496758e-04 |
|
VectorNormDiff
|
2.055964094892033e-01 |
3.766914050479500e-01 |
While analyzing the data from this table it becomes clear that presiceRslt is closer to dplRslt than to exRslt -
all the norms for dplRslt vs preciseRslt are smaller than the corresponding norms
exRslt vs preciseRslt.
The problem we observed ( low precision ) seems to be due to the fact that the function dpl_stencil_o_div_1p, that performs division, is inherently unstable and
thus may not be used on an arbitrary ( random-generated ) input.
The goal of this project is, by using parallelization, to achieve performance gain over performance of the serial code.
That is not always achievable. In this section we provide the reasons for that and offer guidelines to obtain the desirable performance gain.
Invoking and executing parallel code causes significant performance penalties:
- invoking parallel code is very expensive, routines that start and maintain a parallel region are complicated and take significant time to execute
- the created ( by dpl ) parallel code is the result of a significant mathematical transformation
to the original code, it performs more operations ( hopefully in parallel ) than the original sequential code
In order to achieve performance gains ( in spite of the above described performance penalties ) the supported functions are executed in parallel mode
only if certain conditions are met. These conditions depend on the size of the problem ( number of elements to be processed ) and
characteristics of CPU that will execute the parallel code ( e.g. number of threads available ). The restrictions listed bellow
are not exact and in certain cases may not suffice to achieve performance gains.
The following table establishes condition for the
dpl implemented parallel code
to be faster than the corresponding serial code:
for every implemented function the minimal size of the problem ( number of elements to be processed ) is listed
for the number of threads available.
Note that the affect of the STRIDE parameter on the execution time of the parallel code may be detrimental,
the values listed in table are for STRIDE being equal to 1.
Each row represents the basic stencil provided by dpl. Each column lists the number of threads available. The value in the table
is the minimal size of the problem ( number of elements to be processed ) for the parallel code to be faster than the corresponding sequential code - dpl
checks for these conditions and, if they are not fulfilled, the parallel executions is aborted and an error is returned.
|
2
|
3
|
4
|
5
|
> 5
|
dpl_stencil_1p
x[i] = b(i) + a(i)*x[i-1]
|
850 |
1000 |
900 |
900 |
1125 |
dpl_stencil_o_1p
x[i] = c(i)*x[i] + b(i) + a(i)*x[i-1]
|
1250 |
1250 |
900 |
900 |
950 |
dpl_stencil_div_1p
x[i] = b(i) + a(i)*x[i-1]
|
750 |
600 |
500 |
600 |
600 |
dpl_stencil_o_div_1p
x[i] = c(i)*x[i] + b(i) + a(i)/x[i-1]
|
650 |
600 |
500 |
500 |
650 |
dpl_stencil_acc
acc = b(i) + a(i)*acc
|
1250 |
1125 |
1250 |
1250 |
1450 |
dpl_stencil_div_acc
acc = b(i) + a(i)/acc
|
300 |
400 |
450 |
450 |
550 |
dpl_stencil_2p
x[i] = a(i)*x[i-1] + b(i) + c(i)*x[i-2]
|
(1) |
4000 |
2500 |
1750 |
2250 |
dpl_stencil_o_2p
x[i] = d(i)*x[i] + b(i) + a(i)*x[i-1] + c(i)*x[i-2]
|
(1) |
2000 |
1000 |
1250 |
1000 |
dpl_stencil
x[i] = b(i) + ∑j<ia(i,j)*x[i]
|
150 |
175 |
200 |
200 |
250 |
(1) for the specified number of cores the dpl generated parallel code will be always slower than the corresponding serial code
The following table presents results of comparison of the execution time achieved by the parallel version over the execution time
achieved by the sequential version of the same algorithm.
Each row represents the
the basic stencil provided by dpl. Each column lists the CPU used in comparison.
The value in the table is the improvement of the execution time of the parallel code over the execution time of the sequential code achieved on the specified CPU - see
this for the explanation on how these values were calculated.
All codes were executed under Linux operating system on four different CPU's:
- vintage: Intel(R) Core(TM) Duo E8600 @ 3.33GHz CPU with 2 threads
- mainstream: Intel(R) Core(TM) i5-9400 @ 2.90GHz CPU with 6 threads
- advanced: Intel(R) Xeon(R) Silver 4110 CPU @ 2.10GHz with 16 threads
- extreme: Intel(R) Xeon(R) Gold 6226R CPU @ 2.90GHz with 16 threads
It was attempted to run the code under the same conditions on the system with the minimal possible load.
Every code segment was executed 3 times with the execution time used for calculation of the improvement
being neither the best nor the worst.
The size of the problem ( number of elements to be processed ) was set to 10000 for all the functions except
dpl_stencil - for this function
the size of the problem ( number of elements to be processed ) was set to 1000.
The same arguments were used when executing sequential and parallel codes. The arguments were a double precision random numbers in the range
[-1.5;1.5] generated using Dalsoft's Random Testing ( drt ) package - see
this for more information.
|
Core(TM) Duo E8600 |
Core(TM) i5-9400 |
Xeon(R) Silver 4110(1) |
Xeon(R) Gold 6226R(1) |
dpl_stencil_1p
x[i] = b(i) + a(i)*x[i-1]
|
54% |
51% |
71% |
73% |
dpl_stencil_o_1p
x[i] = c(i)*x[i] + b(i) + a(i)*x[i-1]
|
30% |
47% |
58% |
74% |
dpl_stencil_div_1p
x[i] = b(i) + a(i)*x[i-1]
|
23% |
58% |
76% |
82% |
dpl_stencil_o_div_1p
x[i] = c(i)*x[i] + b(i) + a(i)/x[i-1]
|
24% |
52% |
69% |
83% |
dpl_stencil_acc
acc = b(i) + a(i)*acc
|
26% |
53% |
72% |
71% |
dpl_stencil_div_acc
acc = b(i) + a(i)/acc
|
64% |
68% |
84% |
86% |
dpl_stencil_2p
x[i] = a(i)*x[i-1] + b(i) + c(i)*x[i-2]
|
(2) |
41% |
66% |
72% |
dpl_stencil_o_2p
x[i] = d(i)*x[i] + b(i) + a(i)*x[i-1] + c(i)*x[i-2]
|
(2) |
41% |
66% |
72% |
dpl_stencil
x[i] = b(i) + ∑j<ia(i,j)*x[i]
|
43% |
73% |
63% |
60% |
(1) the benchmarks were executed on Microway's compute cluster;
we are grateful for the HPC time provided by Microway, Inc.
(2) dpl generated parallel code will be always slower than the corresponding serial code
The results of this verification show that, on the same inputs,
the differences between dpl_stencil_min and dpl_stencil_max
generated results and results generated by the serial implementation of the corresponding function are acceptably small.
The algorithm used by dpl to implement plain conditional functions
is very complicated and execution time that takes to execute parallel functions dpl_stencil_min and
dpl_stencil_max depends on the values of the
a vector and, to a lesser extend, on the values
of the b vector.
The following table presents improvement of the parallel function dpl_stencil_max over the serial version of the same function.
Each column represents the number of elements being used; the vectors
a and b consist of randomly generated double precision values; generation of random values
was done using Dalsoft's Random Testing ( drt ) package - see
this for more information.
|
10000 |
100000 |
1000000 |
|
parallel/serial
|
54% |
84% |
88% |
However there are distributions of a and b
processing which produce less spectacular improvements, although no case when serial implementation is faster that the corresponding parallel version, was observed.
The results of this verification show that, on the same inputs,
the differences between dpl_stencil_max_st and
dpl_stochastic_max
generated results and the results generated by the serial implementation of the corresponding algorithm
are acceptably small.
The following table presents improvement of the parallel function dpl_stencil_max_st over the serial version of the same function.
Each column represents the number of elements being used; the vectors
a and b consist of double precision values
generated using Dalsoft's Random Testing ( drt ) package - see
this for more information.
|
10000 |
100000 |
1000000 |
|
parallel/serial
|
56% |
63% |
54% |
The following table presents improvement of the parallel function
dpl_stochastic_max
over other implementations of the underlying algorithm, namely:
- "quick parallel" implementation
the desirable stencil x[i,*] = maxst( x[i-1,*], b[i,*] ) is implemented as
dpl_max_st( N, x[i-1.,*], b[i,*], x[i,*] )
note that "quick parallel" implementation of the underlying algorithm
is not part of the dpl library
- serial implementation
call to the serial function
dpl_stochastic_max_serial
- Parallel Vincent's Algorithm
the mainstream parallel implementation of the underlying algorithm;
it is called "Parallel Vincent's Algorithm",
see this for more information.
Also see this for additional evaluation data.
The parallel implementation of the Vincent's algorithm used in this study was
created by utilizing OpenMP.
Every column represents the number of rows being used in the the input matrix that
consists of the double precision values
generated using Dalsoft's Random Testing ( drt ) package - see
this for more information.
The double precision values generated in such a way that makes input matrix to be a transition probabilities matrix
in a Markov chain.
Each row lists the improvements of the the parallel function
dpl_stochastic_max
over other implementations of the underlying algorithm.
|
1000 |
5000 |
10000 |
20000 |
30000 |
40000 |
50000 |
60000 |
70000 |
|
parallel/quick parallel
|
76% |
65% |
56% |
40% |
30% |
24% |
20% |
22% |
21% |
|
parallel/serial
|
20% |
75% |
79% |
77% |
73% |
70% |
66% |
63% |
60% |
|
parallel/parallel Vincent
|
-170% |
20% |
40% |
65% |
53% |
55% |
53% |
50% |
50% |
From the above data some interesting conclusions may be derived:
- the parallel function
dpl_stochastic_max
is always faster than corresponding serial implementation of the underlying algorithm
- the parallel function
dpl_stochastic_max
is always faster than quick parallel implementation of the underlying algorithm
- the parallel function
dpl_stochastic_max
is faster than parallel Vincent's implementation,
except for the small input matrices
- quick parallel implementation of the underlying algorithm
is faster than corresponding serial implementation,
except for the small input matrices
- for reasonably large input matrices the quick parallel implementation
of the underlying algorithm is faster than parallel Vincent's implementation
The following are the results of comparison of the dpl_gs function with the
For every case in this study the arguments used were a double precision random numbers generated using Dalsoft's Random Testing ( drt ) package ( see this for more information ) and a Strictly Diagonally Dominant Matrix was created using the described random numbers generator.
See this for the standalone version of the following study.
The results of this verification show that, on the same inputs, the differences between dpl_gs generated results
and results generated by the serial implementation of the Gauss-Seidel method to solve a linear system of equations
are acceptably small.
The following graph presents results of the performance comparison between
parallel and serial implementations of the Gauss-Seidel method to solve
a linear system of equations:
- The X axis lists different sizes for the problem we attempted to study, e.g. 2000 means that the input matrix was 2000x2000 and the input/output vectors were of the size 2000
- The Y axis lists percent of improvement achieved by the parallel code over the serial one; the results were calculated as described here
- The legend specifies on what CPU the plotted data was generated

Both these functions solve linear equations Ax=b, where
A is the input matrix
b is the input right-hand vector
x is solution of the linear equations Ax=b
Every call to dpl_gs solves one linear equation, specified by the input arguments, utilizing threads available.
LAPACKE_dgesv allows for a given matrix to solve
many linear equations by using different right-hand vectors - the input matrix is transformed into
optimal representation and every linear equation is solved "quickly" using this optimal matrix(es).
For the comparison to be fair ( especially when monitoring execution time ) we utilize the following procedure:
- peek up a number nrh of right-hand vectors to process
- generate nrh vectors
- run nrh iterations performing dpl_gs for every
right hand vector generated
- perform LAPACKE_dgesv for all
right hand vector generated
The results of this verification show that, on the same input, the differences between dpl_gs generated results
and LAPACKE_dgesv generated results are acceptably small.
The execution time of processing nrh cases by dpl_gs,
that is reported by our test suite, is equal to:
-
Ttotal = Tsetup + nrh*Tgs
where
- Tsetup is the time to setup the package ( random number generation etc. )
- Tgs is the time that it takes to execute one invocation of the dpl_gs,
doesn't depend on nrh
We assume that the execution time of processing nrh cases by LAPACKE_dgesv, that is reported by our test suite, is equal to:
-
Ttotal = Tsetup + Tdgesv_preprocess + nrh*Tdgesv
where
- Tsetup is the time to setup the package ( random number generation etc. ), identical to the setup time
while executing dpl_gs
-
Tdgesv_preprocess is the time that it takes to
transform the input matrix into optimal representation,
doesn't depend on nrh
-
Tdgesv is the time that it takes to process one equations
using an optimal representation of the matrix,
doesn't depend on nrh
Under such assumptions, provided that
Tgs > Tdgesv, for any size of the matrix there is nrh such that solving
nrh equations by LAPACKE_dgesv will be
faster than solving the same nrh equations by dpl_gs.
Here we will calculate the even-point nrhEven of cases when,
for a given size, the execution times of processing
nrhEven cases by dpl_gs and LAPACKE_dgesv are the same.
For every size of the problem we studied the following procedure was utilized:
- peek up reasonably large number of equations nrh to be solved - 100 in this study
-
run the benchmark without executing dpl_gs nor LAPACKE_dgesv - the execution time reported will be equal to Tsetup_nrh
-
run the benchmark executing dpl_gs - the execution time reported will be equal to
Ttotal_nrh_gs = Tsetup_nrh + nrh*Tgs
-
run the benchmark executing LAPACKE_dgesv - the execution time reported will be equal to
Ttotal_nrh_dgesv = Tsetup_nrh + Tdgesv_preprocess + nrh*Tdgesv
-
double the number of equations and run the benchmark without executing
dpl_gs nor LAPACKE_dgesv - the execution
time reported will be equal to Tsetup_2*nrh
-
double the number of equations and run the benchmark LAPACKE_dgesv - the execution time
reported will be equal to Ttotal_2*nrh_dgesv = Tsetup_2*nrh + Tdgesv_preprocess + 2*nrh*Tdgesv
To summarize, after applying the above procedure, we calculated:
- Tsetup_nrh
- Ttotal_nrh_gs = Tsetup_nrh + nrh*Tgs
- Ttotal_nrh_dgesv = Tsetup_nrh + Tdgesv_preprocess + nrh*Tdgesv
- Tsetup_2*nrh
- Ttotal_2*nrh_dgesv = Tsetup_2*nrh + Tdgesv_preprocess + 2*nrh*Tdgesv
and we looking for nrhEven such that
- nrhEven*Tgs = Tdgesv_preprocess + nrhEven*Tdgesv
which can be obtained as following
- Tgs = ( Ttotal_nrh_gs - Tsetup_nrh )/nrh
- Tdgesv = ( ( Ttotal_2*nrh_dgesv - Tsetup_2*nrh ) - ( Ttotal_nrh_dgesv - Tsetup_nrh ) )/nrh
- Tdgesv_preprosess = ( ( Ttotal_nrh_dgesv - Tsetup_nrh ) - ( Ttotal_2*nrh_dgesv - Tsetup_2*nrh ) + ( Ttotal_nrh_dgesv - Tsetup_nrh )
- nrhEven=Tdgesv_preprocess/(Tgs-Tdgesv)
and, finally,
-
nrhEven=nrh*(2*(Ttotal_nrh_dgesv - Tsetup_nrh ) - ( Ttotal_2*nrh_dgesv - Tsetup_2*nrh ) )/( (Ttotal_nrh_gs - Tsetup_nrh) - ( Ttotal_2*nrh_dgesv - Tsetup_2*nrh ) + ( Ttotal_nrh_dgesv - Tsetup_nrh ) )
The following graph shows the even points for the number of right-hand vectors being processed ( nrh )
when, for a given size, the execution times of processing nrh cases by
dpl_gs and LAPACKE_dgesv are the same. Therefore if
it is necessary, for a given matrix size, to solve more than that number of equations, LAPACKE_dgesv
will be faster, otherwise dpl_gs will be faster.
- The X axis lists different sizes for the problem we attempted to study, e.g. 2000 means that the input matrix was
2000x2000 and the input/output vectors were of the size 2000
- The Y axis lists the value of an even point for a given size of the problem
- The legend specifies on what CPU the plotted data was generated
The following are the results of the comparison of the dpl_p1p0_p0p1_p0p0_p0n1_n1p0 function with the
serial implementation of this function.
The results of this verification show that, on the same inputs, the differences between dpl_p1p0_p0p1_p0p0_p0n1_n1p0 generated results
and results generated by the serial implementation of this algorithm are acceptably small.
The following graph presents results of the performance comparison between
parallel and serial implementations of the general 2D 5-points stencil:
- The X axis lists different sizes for the problem we attempted to study, e.g. 2000 means that the input input/output matrices were of the size 2000x2000
- The Y axis lists percent of improvement achieved by the parallel code over the serial one; the results were calculated as described here
- The legend specifies on what CPU the plotted data was generated
As can be noticed from that graph, the performance gain begin to deteriorate
as the size of the problems increases - somewhere approaching 5000. We run the comparison
for even larger number of elements and the problem only got worse.
The following table summarizes these results.
Each row represents the number of elements being used.
Each column represents the number of threads being utilized.
|
6 |
8 |
10 |
16 |
|
20000
|
22.38% |
24.07% |
24.72% |
25.49% |
|
30000
|
6.81% |
7.52% |
7.63% |
8.17% |
|
40000
|
7.04% |
7.75% |
7.89% |
8.29% |
The code is reading from 7 input arrays and at some point, it seems to us, the CPU is not capable to keep up. To verify this presumption we created a simplified version
of the 2D 5-points stencil ( actually, very useful one )
and implemented it using
dpl_p1p0_p0p1_p0p0_p0n1_n1p0 routine
from the dpl library. The newly created routine,
as implemented, is reading from 4 input arrays ( compared to 7 input array of the original code ).
The following graph presents results of the performance comparison between
parallel and serial implementations of the simplified 2D 5-points stencil:
From that graph it is clear that newly created routine holds it ground better that the original one.
Even when we run the task for larger number of elements the problem was not so profound - the following table summarizes these results.
Each row represents the number of elements being used.
Each column represents the number of threads being available.
|
6 |
8 |
10 |
16 |
|
20000
|
43.08% |
49.97% |
52.41% |
54.7% |
|
30000
|
36.64% |
43.29% |
45.71% |
47.85% |
|
40000
|
30.15% |
37.15% |
39.21% |
41.18% |
Here we show
- how to apply routines from the dpl in order to optimize benchmarks and/or applications
- how to modify the existing code in order to utilize the technology that dpl relys on
The following contains
- samples of serial code being optimized by applying our technology:
see this, this and this
- samples of parallel code being improved by applying our technology: see this and this
It is important to note that we don't know about any existing way to improve the code shown. The use of dpl seems to be the only currently available option to achieve that.
Please note that routines shown here are not part of the dpl package. Please Contact us to discuss the parallel implementation of a serial code of your choice.
The following shows the results of applying routines from the dpl in order to optimize benchmarks and/or applications.
See this for the text version of the following material.
Here we study a benchmark from the PolyBench benchmark suite - see
this for information about this benchmark suite:
disclaimer, copyright and how to download.
We used the following code segment from the
adi benchmark of the PolyBench benchmark suite:
The code was slightly modified to allow use of the routines from the
dpl library.
The following graph presents results of the performance comparison between
modified and the original codes.
- The X axis lists different sizes for the problem we attempted to study
( the value of _PB_N )
- The Y axis lists percent of improvement achieved by the modified code that uses dpl library over the original serial one; the reported results were calculated as described here
- The legend specifies on what CPU the plotted data was generated
Here we show how the technology, developed in dpl, may help to parallelize applications that do not appear as stencils.
Please Contact us to discuss the parallel implementation of a serial code of your choice.
DSP filters seems to be well suited for parallelization using our technology.
We downloaded the code for the ORDER order Normalized Lattice filter processing NPOINTS points ( latnrm ) from the internet - we will refer to this code as serial version of the function:
As it appears above, it is difficult to see any code patterns ( stencils )
that might allow to apply our technology.
However the code may be rewritten as ( only loops are shown )
which makes it possible for a number of the available techniques to be applied. Note that in this case none of the routines from the dpl
library may be used directly.
However the technology developed for the implementation of this library may be used here.
We parallelized the one-point stencil
left = Coefficients[j-1] * left - Coefficients[j] * InternalState[j]
overlapping the generated parallel code with the rest of the routine.
This led to the generation of the parallel code for the latnrm DSP filter listed above.
The evaluation of the created parallel code was done under Linux operating system running on the
AMD EPYC 7713 Processor with 16 threads.
The following graph presents improvement of the created parallel implementation of the function latnrm over it
serial version.
- The X axis lists different sizes for the problem we attempted to study
( the value of NPOINTS; ORDER was always set to NPOINTS>>1; the input arrays
consist of randomly generated double precision values; generation of random values
was done using Dalsoft's Random Testing ( drt ) package - see
this for more information ).
- The Y axis lists percent of improvement ( or otherwise ) achieved by the created parallel implementation of the function latnrm over it serial version;
the reported results were calculated as described here
- The legend specifies on what CPU the plotted data was generated
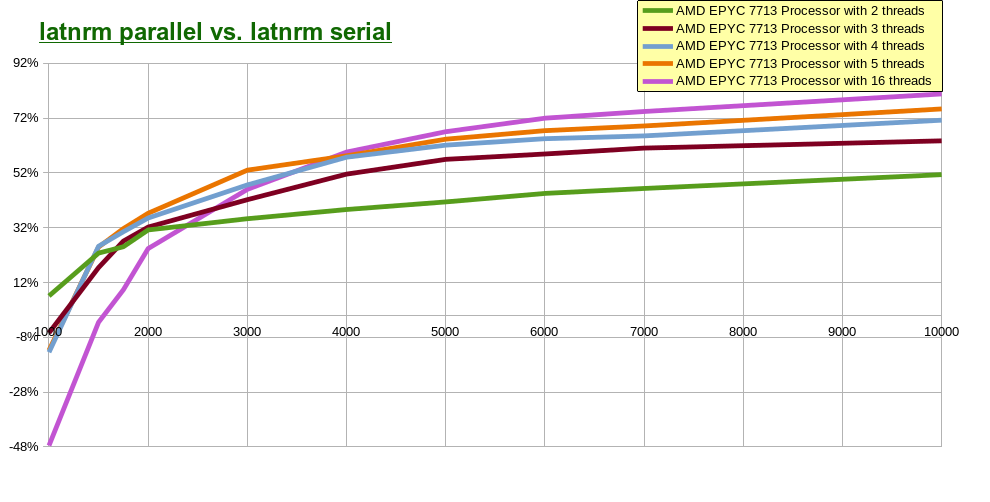
- using 16 threads leads for fastest execution time only
if the value of NPOINTS is 4000 or greater.
- for smaller values of NPOINTS ( e.g. 1000 ), the best results achieved with the
smaller number of threads utilized ( e.g. 2 threads for NPOINTS being 1000 ).
See this for similar study.
Analyzing the code samples used in computational finance, it is quite obvious about abound opportunities for parallelization. We will analyze some of it and show how the technology, developed in dpl, may be applied to improve the performance of these applications through parallelization. See this for the standalone version of the following study.
The following contains parallel implementation for the
Please note that routines shown here are not part of the dpl package. Please Contact us to discuss the parallel implementation of a serial code of your choice.
We use the following C++ code, developed by Dr. Fabrice Douglas Rouah ( see this ), as the base for our study.
The following optimizes European and American Call options. The corresponding Put options can be handled similarly.
The European Call option is implemented by the following code portion of the original code
with n being number of time steps utilized.
We will refer to the executable derived from this code as serial implementation.
The internal loop of the above code is parallel and may be easily parallelized using OpenMP - we will refer to the executable derived from that parallel version of code as
quick_parallel implementation.
However there is a way to create a better parallel code.
Perform Loop interchange of the above code getting the loop
Now the internal loop is not parallel but it is a stencil ( reminiscent to the one-point stencil dpl_stencil_1p )
and the technology, developed in dpl, may be applied to parallelize and improve this code.
The major sources of optimization of the loop after interchange are:
- cache friendly memory access
- one parallel invocation for all the code
- the ability to create loop pipeline for the encompassing
for ( i = n - 1; i >= 0; i-- ) loop
Combined with the careful coding we obtain an executable which is refereed as
parallel implementation.
The following timing improvement was observed on the
Intel® Core(TM) i5-9400 Processor with 6 threads.
Each column represents the number of time steps utilized.
Each row represents improvement of the code of the first specified executable type over the code of the second executable type.
|
1001 |
1501 |
2001 |
2501 |
3001 |
3501 |
4001 |
10001 |
|
parallel/quick_parallel
|
44.79% |
39.68% |
44% |
41.03% |
29.17% |
25.71% |
20.41% |
11.24% |
|
parallel/serial
|
-113% |
-18.75% |
50.88% |
59.65% |
58.54% |
61.19% |
61.76% |
59.42% |
|
quick_parallel/serial
|
-272% |
-97% |
12.28% |
31.58% |
41.46% |
47.76% |
51.96% |
54.28% |
From the above data some interesting conclusions may be derived:
- parallel implementation is always faster that corresponding
quick_parallel implementation of the underlying algorithm
- for reasonably large number of time steps utilized, parallel
and quick_parallel implementations are faster that
serial implementation of the underlying algorithm
The American Call option is implemented by the following code portion of the original code
with n being the number of time steps utilized
and S being the input binomial tree.
We will refer to the executable derived from this code as serial implementation.
The internal loop of the above code is parallel and may be easily parallelized using OpenMP - we will refer to the executable derived from that parallel version of code as
quick_parallel implementation.
However we will create a better parallel code.
Perform Loop interchange of the above code getting the loop
Now the internal loop is not parallel but it is reminiscent of the conditional stencil dpl_stencil_max
and the technology, utilized by dpl for implementation of this stencil, may be applied to achieve the better performance for Leisen-Reimer implementation of the American Call option.
The major sources of optimization of the loop after interchange are:
- cache friendly memory access
- one parallel invocation for all the code
- the ability to create loop pipeline for the encompassing
for ( i = n - 1; i >= 0; i-- )
loop
Combined with the careful coding we obtain an executable which is refereed as
parallel implementation.
The following timing improvement was observed on the
Intel® Core(TM) i5-9400 Processor with 6 threads.
Each column represents the number of time steps utilized.
Each row represents improvement of the code of the first specified executable type over the code of the second executable type.
|
1001 |
1501 |
2001 |
2501 |
3001 |
3501 |
4001 |
10001 |
|
parallel/quick_parallel
|
36.79% |
40.8% |
42% |
38.79% |
32.25% |
26.27% |
25.45% |
18.29% |
|
parallel/serial
|
41.23% |
69.17% |
73.48% |
74.64% |
74.56% |
73.64% |
73.23% |
69.54% |
|
quick_parallel/serial
|
7.02 |
47.92 |
54.27% |
58.57% |
62.44% |
64.44% |
64.09% |
62.73% |
From the above data some interesting conclusions may be derived:
- parallel implementation is always faster that corresponding
quick_parallel implementation of the underlying algorithm
- parallel
and quick_parallel implementations are always faster that
serial implementation of the underlying algorithm
Here we will use Crank-Nicolson Finite Difference Method for Option Pricing
to find the numeric solution to the Black, Scholes and Merton
partial differential equation ( see this for the description )
Where:
t - a time in years;
t = 0 being initial time ( "now" )
S(t) - the price of the underlying asset at time t
V(S,t) - the price of the option as a function of the underlying asset S at time t
r - the the annualized risk-free interest rate
σ - the volatility of the stock
We assume the time is running from "now" ( 0 ) to some specified value YearsToMaturity and
the price of underlying asset is running from 0 to some specified value MaxPrice.
Divide the (t,S)
plane into a grid of N+1xM+1 equaly spaced points
ti = Δt i, i = 0,...,N
Sj = ΔS j, j = 0,...,M
where
Δt = YearsToMaturity/N,
ΔS = MaxPrice/M.
We denote the value of the derivative at time ti when the underlying asset has value
Sj as
Vi,j =
V(
iΔt, jΔS ) =
V(
ti,Sj ) for
i = 0,...,N; j = 0,...,M
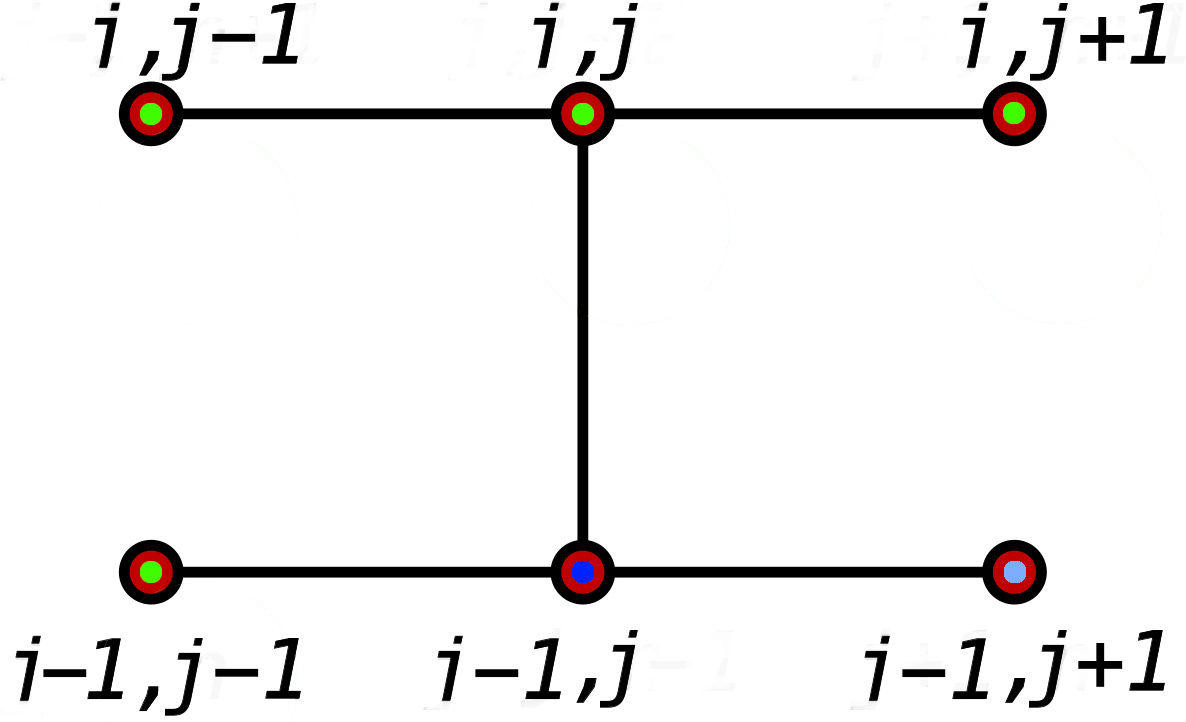
Crank-Nicolson method uses the following discretization of the above the Black, Scholes and Merton
partial differential equation
−ajVi−1,j−1 + ( 1 − bj )Vi−1,j − cjVi−1,j+1 = ajVi,j−1 + ( 1 + bj )Vi,j + cjVi,j+1
for i = 1,...,N; j = 1,...,M-1
where
aj = Δt( σ2j2 - rj )*0.25
bj = -Δt( σ2j2 + r )*0.5
cj = Δt( σ2j2 + rj )*0.25
For a given StrikePrice, to calculate European Put option, we establish the following boundary conditions:
Vi,0 = StrikePrice*exp( -r(N-i)Δt) for i = 0,1,...,N
Vi,M = 0 for i = 0,1,...,N
VN,j = max( StrikePrice - j*ΔS, 0 ) for j = 0,1,...,M
The discretization cited earlier can be rewritten as:
( 1 − bj )Vi−1,j =
ajVi−1,j−1 +
cjVi−1,j+1 +
ajVi,j−1 + ( 1 + bj )Vi,j + cjVi,j+1
for i = 1,...,N; j = 1,...,M-1
or
Vi−1,j =
AjVi−1,j−1 +
Bj
for i = N,...,1; j = 1,...,M-1
where
Aj = aj/( 1 − bj )
Bj = (
cjVi−1,j+1 +
ajVi,j−1 + ( 1 + bj )Vi,j + cjVi,j+1 )/( 1 − bj )
The newly created expression is a stencil for which the technology provided by dpl enables parallel execution.
 We execute these stencils for i starting with N till 1. At every given step
We execute these stencils for i starting with N till 1. At every given step
-
Vi−1,j−1 is defined by
the established boundary condition ( for j being 1 ) or calculated at the previous step of the stencil ( for other values of j )
-
Vi−1,j+1 is defined only for j being M-1 ( as the established boundary condition ); for other values of j the currently existing value of Vi−1,j+1 is used; that requires the initialization of all the elements of V ( except the boundary described earlier ) to some reasonable initial values and iterations of the algorithm till the desirable precision has been reached
-
Vi,j−1, Vi,j, Vi,j+1 are defined by the the established boundary conditions ( for i being N ) or calculated at the previous iterations of the proposed algorithm ( for other values of i )
The following timing improvement was observed on the
Intel® Core(TM) i5-9400 Processor with 6 threads.
We used the square grid - N being equal to M. Each column represents the
value of N - number of time steps utilized.
The row represents improvement of the parallel version of the described algorithm over it serial version.
|
200 |
250 |
300 |
350 |
400 |
450 |
500 |
|
parallel/serial
|
-6.14% |
17.75% |
28% |
37% |
41% |
50% |
54% |
Heston stochastic volatility model is an extension of the Black Scholes model that doesn't assume a volatility to be constant.
The following shows the results of optimization ( parallelization ) for calculation of a European Call option using Heston model for a discretisation technique known as "Full Truncation Euler Discretisation, coupled with Monte Carlo simulation", see this for the theoretical reference.
The implemented algorithm is as follows:
The following timing improvement was observed on the
Intel® Core(TM) i5-9400 Processor with 6 threads.
We run every simulation for 100000 iterations.
Each column represents the value of NumberOfPoints - number of time steps utilized.
The row represents improvement of the optimized ( parallel ) version of the described algorithm over it serial version.
|
500 |
1000 |
1500 |
2000 |
2500 |
3000 |
3500 |
|
parallel/serial
|
61.79% |
65.11% |
66.68% |
66.87% |
66.91% |
67.73% |
68.54% |
See this for the description and analysis of the parallel implementation of the Smith-Waterman algorithm that utilizes technology developed in dpl.
Polynomial evaluation is a well studied topic. Many of the algorithms developed allow parallel implementation using routines provided by the dpl.
The following shows how to create parallel implementation for the Horner's method - one of the better known ways for efficient evaluation of polynomials.
Similar parallel implementation may be derived for other functions related to the Horner's method, e.g. polynomial division.
Horner's method for polynomial evaluation - see
this for the description/explanation - represents the polynomial to be evaluated
p(x) =
c0 +
c1x +
c2x2 +...+
cnxn
as
p(x) =
c0 +
x (
c1 +
x (
c2 +...+
x (
cn-1 + cnx )...))
Note, that for a and b being ( allocated ) arrays of n double precision values and set as following:
a[i] = x
b[i] = cn-i-1
for i = 0,...,n-1
and acc being a double precision variable set as following:
acc = cn
Horner's representation of the polynomial p(x) may be regarded as the stencil
acc = a[i]*acc +
b[i] for i = 0,...,n-1
which is implemented by the function dpl_stencil_acc from dpl.
The more efficient implementation may be created utilizing the fact that all the elements of the array a have the same value.
The current OpenMP version of dpl is available on x86 Linux systems and Windows.
The OpenCL version, that supposed to run on a wide range of hardware, is also available.
Code, being written in C, can be directly ported to any
sane
multi-core architecture running under a system that provides a decent C compiler
with OpenMP support.
Please contact us if you are interested to port dpl to your system.
We created the OpenCL version of the product - dpl_ocl - a while ago but due to the bug
in the llvm tool chain ( see
this )
could not release it. With the availability of the release 13.0 of the clang, it became possible to use
llvm-spirv to create binary version of the
dpl_ocl's kernels, albeit under severe restrictions:
compiler optimization may not be used ( see
this for details ). Not being able to optimize the product that supposed to be fast doesnt make much sense. Because of this we decided to
- release the OpenCL implementation for a reasonable subset of the functions
implemented by dpl - see the apropriate section in the users manual for the description and instructions on how to use.
- tag this OpenCL version of the product as "experimental" and offer it free of charge - visit this for the description and download.







 We execute these stencils for
We execute these stencils for